Opracowałem, w miarę prostą i powtarzalną w domowych warunkach, metodę pomiaru prędkości AW. Metodę testowałem na jednym z już wykonanych napędów, który jest zaprogramowany jak wszystkie inne urządzenia więc można traktować dalszy opis jako przystający do pozostałych urządzeń.
Metoda wymaga jedynie posiadania lasera, trochę matematyki oraz zegarka do pomiaru czasu.
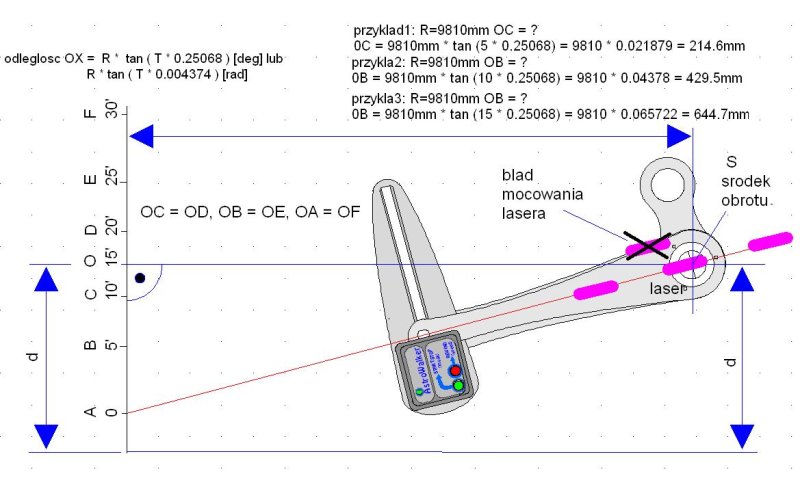
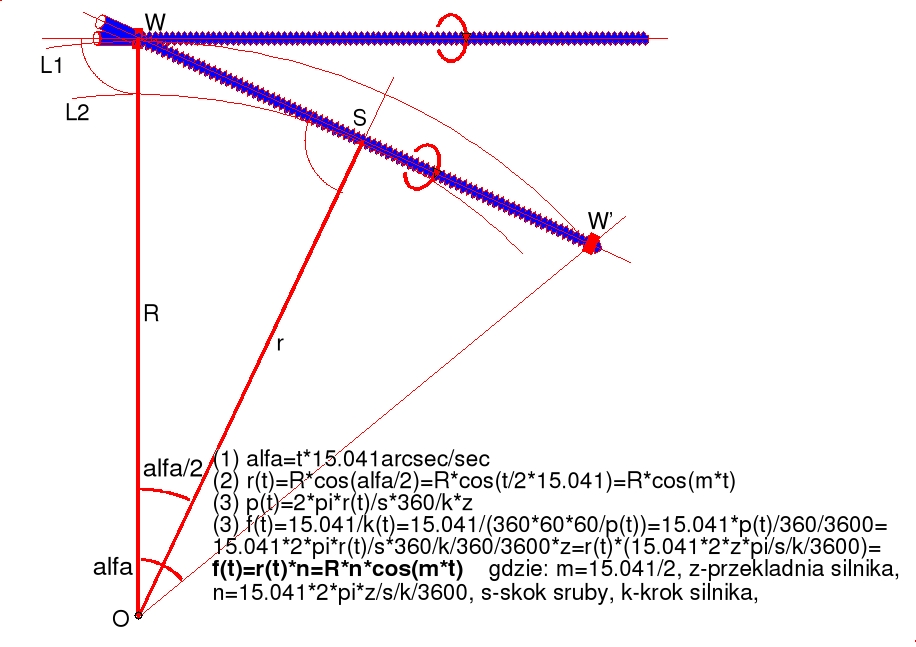
Na rysunku brakuje oznakowania wymiaru R. Jest to odległośĆ osi głównej napędu do ściany pomiarowej (ta odległość wyznaczona jest na rysunku jako najdłuższa, niebieska strzałka). Dotakowo, zmienna T dla podanych wzorów musi być wyrażona w pełnych minutach. Wzory podałem dla przypadkw kiedy funkcję tangens wylicza się dla stopni lub dla radianów. To ważna uwaga, którą trzeba uwzględniać w wyliczeniach. Podaną metodą można oczywiście testować dowolny napęd.
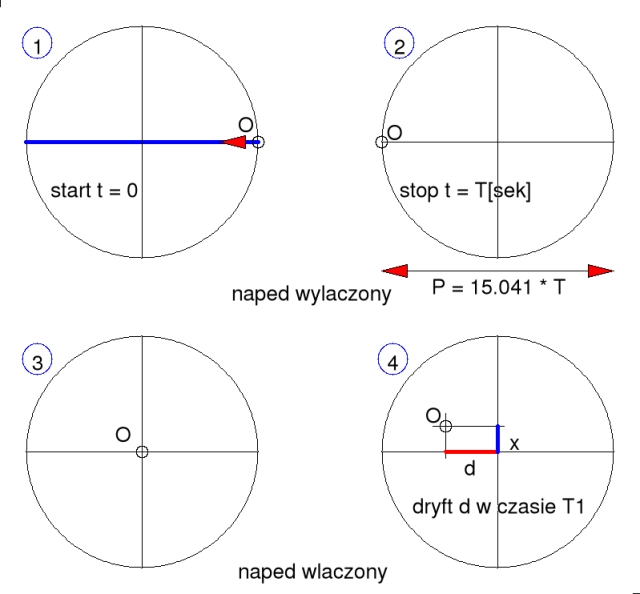
Do pomiaru należy ustawić stabilnie napęd w pozycji poziomej - najlepiej na używanej głowicy pomiarowej - a następnie w odległości kilku metrów od osi głównej napędu należy wyznaczyć punkt O leżący na linii prostopadłej do ściany, na której będzie się odbywał pomiar. Aby wyznaczyć kąt prosty można wspomóc się mierząc odległość d od osi głównej napędu do ściany przy napędzie oraz taką samą odległość na ścianie pomiarowej. Generalnie biorąc im dalej znajduje się ściana tym dokładniejszy będzie pomiar. Dla odległości ok. 3.5m dokładność sięga ok. 30arcsec, w odległości 10m wzrasta do 10 arcsec.
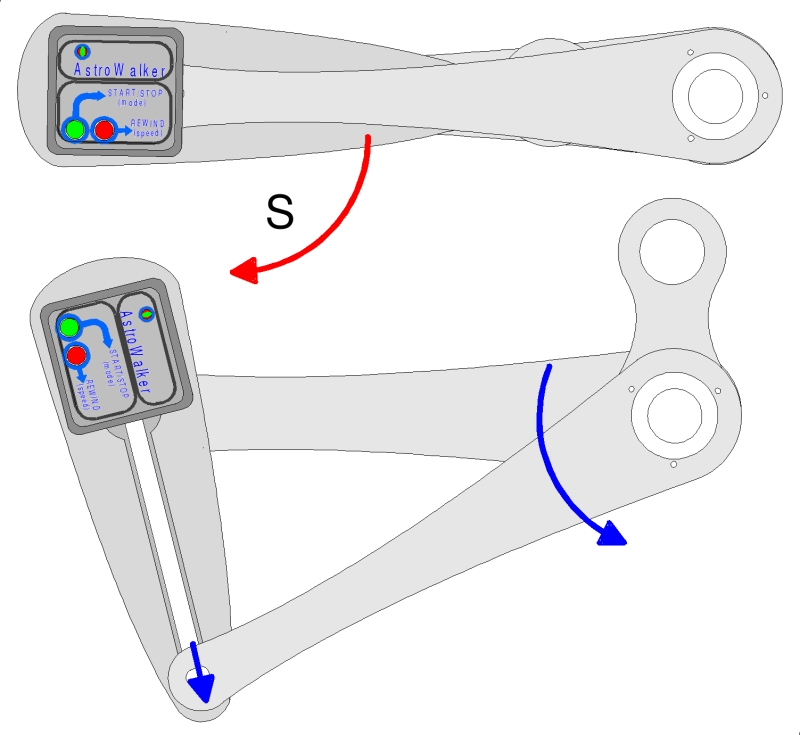
Rysunek pokazuje sposób mocowania lasera, którego oś musi leżeć na osi ramienia ruchomego choć niekoniecznie nad środkiem obrotu napędu. Laser można zamocować na ramieniu w najprostszy sposób, np. taśmą klejącą, istotne jest aby leżał on na osi ruchomego ramienia.
Początkowo należy na ścianie ustalić linię, po której będzie się poruszał promień lasera podczas śledzenia - można to zrobić obracając głowicę, do której będzie zamocowany napęd. Wzdłuż tej linii należy nakleić papier aby zaznaczać na nim położenia promienia w trakcie pomiaru.
Ze względu na nieliniowość zjawiska należy wyznaczyć punkty kontrolne - na rysunku pokazałem jak to zrobić dla momentów 5, 10 i 15 minut. Odcinki pomiarowe odpowiadające chwilom pomiaru zależą od odległości napędu od ściany -R.
Sam pomiar można wykonać w dowolnym miejscu na .ścieżce śledzenia. Zatrzymany napęd (promień lasera) trzeba ustawić np. w punkcie A i w momencie kiedy sekundnik zegarka wskaże zero należy włączyć śledzenie. Dobrze działający napęd powinien pokonywać kolejne odcinki do B, C, O, D, E, F w odcinkach pięcio minutowych.
 http://lx-net.pl/aw/po1.jpg
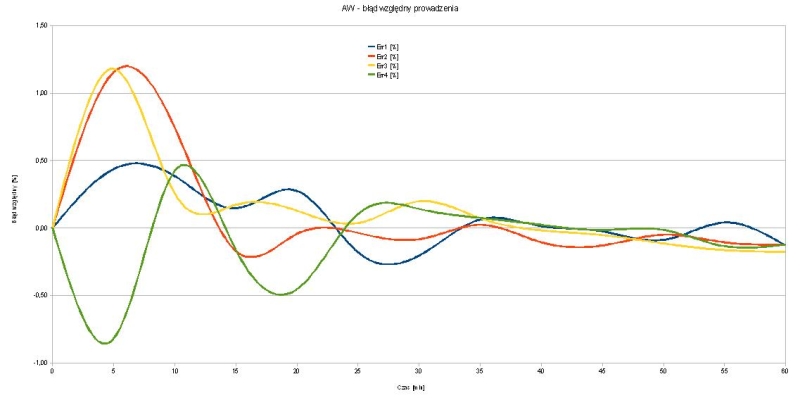
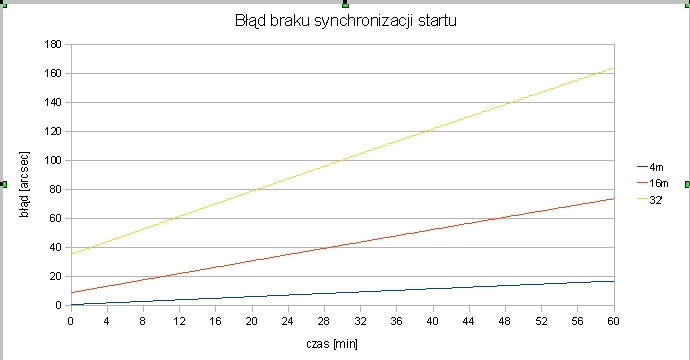
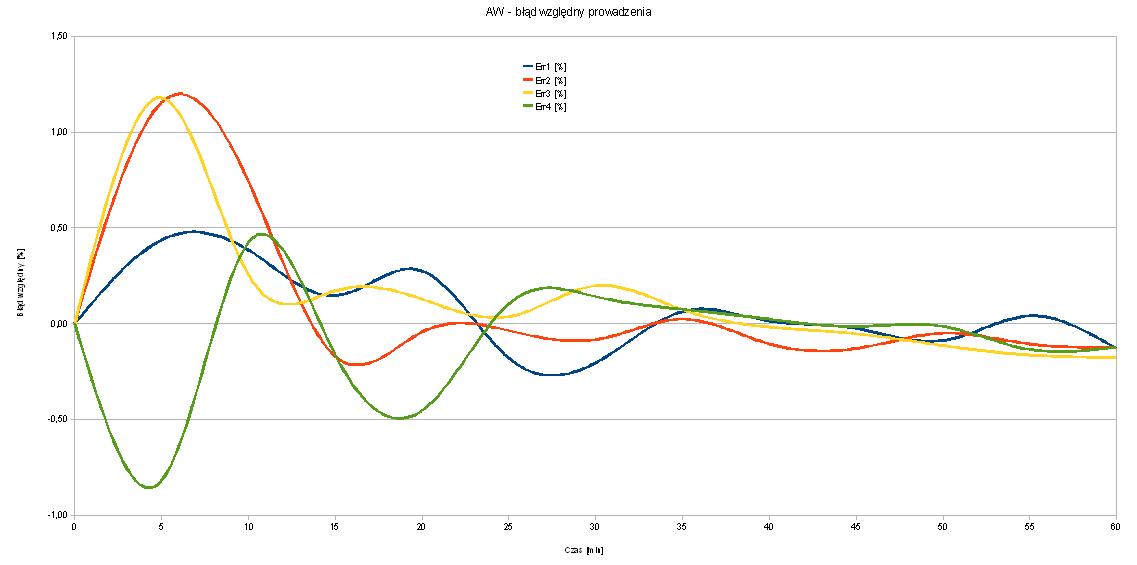
http://lx-net.pl/aw/po1.jpgRysunek pokazuje wyniki jakie uzyskałem podczas testowania. Pomiar wykonywany był co 5 minut przez zmierzenie różnicy czasu jakiego potrzebował napęd do osiągnięcia znaczników na ścianie w stosunku do 5, 10, 15 itd. minut pomiaru na zegarku. Różnice są sekundowe a dokładność ich pomiaru i odczytu wskazań na rysunkach szcuję na 1mm w odległości 3.3m czyli ok. 30 arcsec. Rysunek pokazuje błąd względny, czyli odniesiony do skumulowanego czasu i jak widać im dłuższy pomiar tym lepszy wynik co jest naturalną konsekwencją przyjętej metody pomiarowej. Szacuję, że błąd ustawienia prędkości liczony w dłuższym odcinku czasu sięga nie więcej niż -0.2%. Oznacza to kilka sek. opóźnienia dla czasu śledzenia rzędu 1 godziny. Wykres niebieski i czerwony to dwa pomiary próbne, wykres żółty wykonywałem w warunkach przerw po każdych 5 minutach śledzenia trwających od 1 do 4 minut. W końcu wykres zielony pokazuje prowadzenia napędu pod obciążeniem ok. 9.5kg.
 http://lx-net.pl/aw/po2.jpg
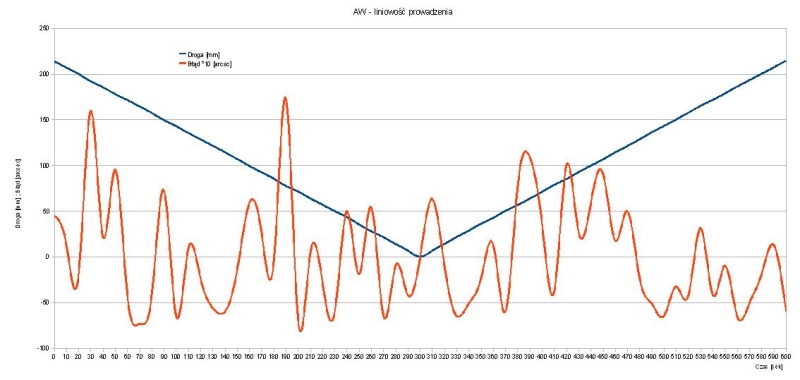
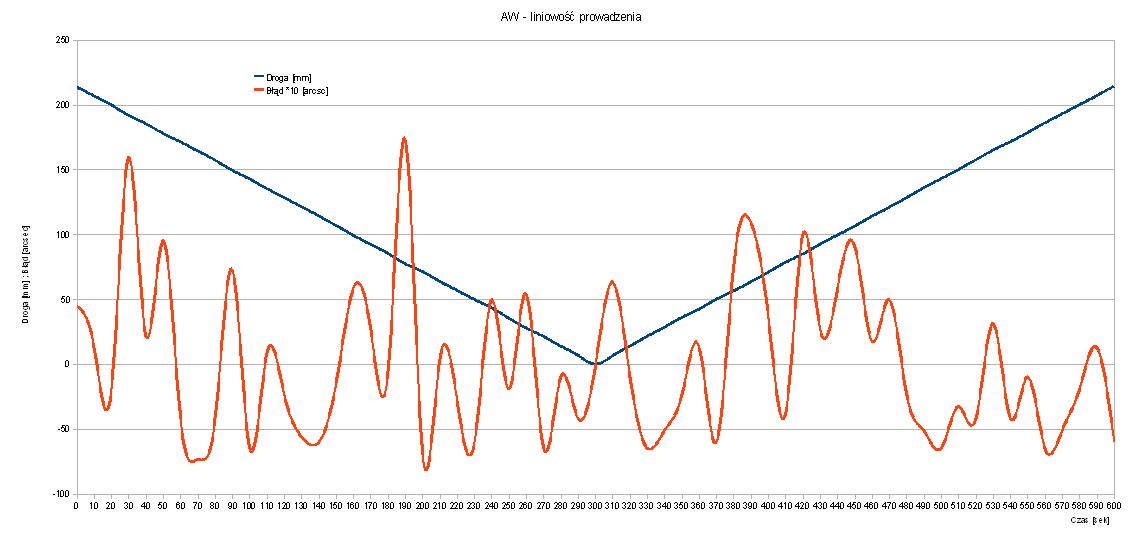
http://lx-net.pl/aw/po2.jpgWykonałem również test liniowości prowadzenia napędu wykonany w przedziale ok. -+5 minut względem punktu O kiedy napęd był rozwinięty mniej wiecej do połowy zakresu pracy. Pomiary wykonywane były co 10 sek. Linia niebieska pokazuje odległość plamki w mm względem punktu O w czasie od -5 do +5 miut a wykres czerwony to powiększona 10 krotnie różnica w położeniu napędu względem wyliczeń teoretycznych. Powiększenie 10 krotne wynika z chęci pokazania obu przebiegów na jednym rysunku. W rzeczywistości więc błąd oscyluje gdzieś pomiędzy +15 a -15 arcsec. Należy przy tym wziąć pod uwagę, że ze względu na odległość bazy pomiarowej (ok. 10m) błąd odczytu wyniku wynosi 0.5mm oraz ok. 0.5 sek. co się dla tej odległości przekłada na kąt ok. 10arcsec tak więc pokazane oscylacje w dużej mierze pochodzą z metody pomiarowej.
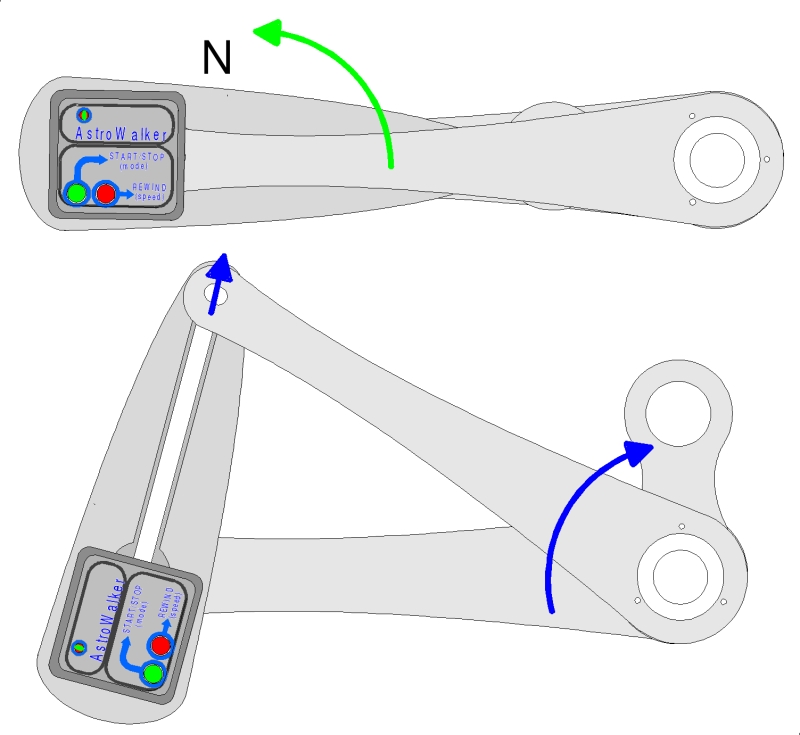
Prowadzenie pod obciążeniem wykonywałem za pomocą pokazanego na kolejnym zdjęciu złomu (wiertarka oraz imadło) - z oczywistych powodów dla poziomego ułożenia napędu.


Na koniec informuję, że na swojej stronie:
http://lx-net.pl/aw/aw1.htmlkontynuuję opis AW - tym razem zaczynam uzupełniać opis samodzielnego montażu AW z przygotowanych wstępnie podzespołów z czego najbardziej istotny jest gotowy zespół elektroniki oraz zespół napędowy (silnik, śruba napędowa oraz wodzik). Z tego względu montaż napędu wymagał będzie jedynie podstawowych narzędzi mechanicznych (wkrętak, nóż, kombinerki, papier ścierny) a dzięki wstępnemu sprawdzeniu i przygotowaniu sterowania (elektronika + napęd) nie powinno być kłopotu z prawidłowym złożeniem i uruchomieniem napędu. Zastosowałem inny materiał, tym razem w kolorze czarnym, który jest znacznie lżejszy niż poliwęglan (Black AW). Chcę zastosowac ten materiał w połączeniu ze śrubą M5 co z jednej strony ułatwia wykonanie napędu a z drugiej strony skróci czas niezbędny do przewinięcia napędu. Dokonałem również modyfikacji zasilania i teraz nie będzie potrzebny reduktor - wystarczy stabilizowany zasilacz 12V/0.5A.
L.J.







{kind=link}
{kind=link}
{kind=link}