
W szczególności udało się w obudowie zmieścić gotowe sterowniki (wzmacniacze) do silników krokowych - drv8825. W ten sposób, w jednym miejscu udało się pomieścić wszystkie urządzenia elektroniczne niezbędne do sterowania montażem paralaktycznym lub platformą paralaktyczną w obu osiach.
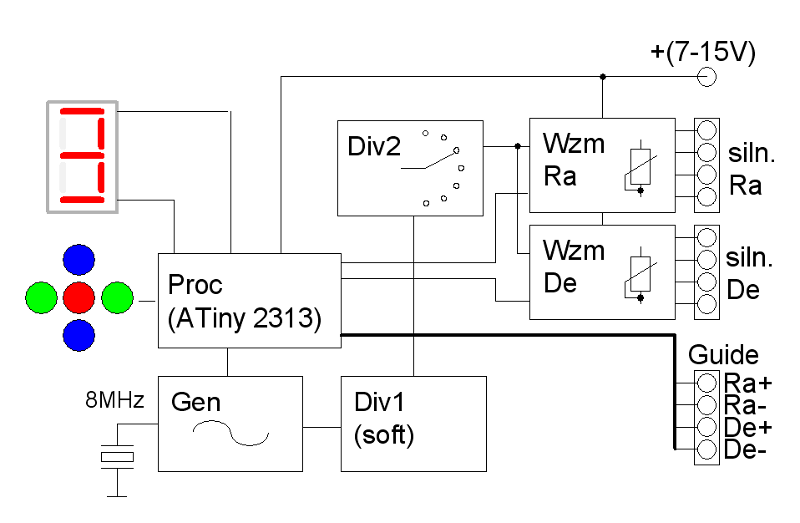
AstroPilot to, w początkowym zamyśle, elektroniczny generator sygnału zegara dla sterowania montaży w oparciu o silniki krokowe. Podstawą AstroPilota jest generator kwarcowy 8MHz oraz zespół dwóch podzielników Div1 i Div2, z których pierwszy, x1, jest programowalny w zakresie od 2 do ok. 60000 a drugi, x2, ustawiany za pomocą zwory w zakresie 2-9. Częstotliwość wyjściowa ma wartość f=8MHz/2/x1/x2. W ten sposób możliwe jest ustawienie każdej częstotliwości sterowania silnikiem z dokładnością przewyższającą wymagania dla każdego montażu poruszanego za pomocą silnika krokowego. Działanie AstroPilota i możliwość programowania zapewniają: mikroprocesor ATiny2313, wyświetlacz 7-segmentowy oraz kilka klawiszy, które w trakcie normalnej eksploatacji stanowią klawisze nawigacyjne do wykonywania akcji w osiach Ra i De. W nowym schemacie AstroPilota widać dodatkowe sterowniki/wzmacniacze oraz styki do realizacji funkcji guide.
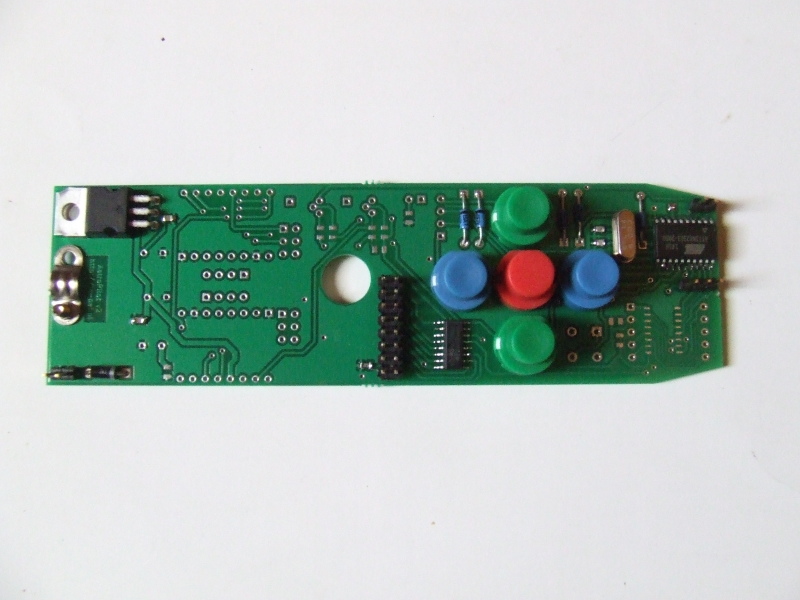
Nowa płytka drukowana (pokazana tu jako częściowo zmontowana) to profesjonalny druk dwustronny z metalizacją otworów oraz z przewagą elementów montowanych metodą montażu powierzchniowego (na przykład układy scalone). To nieco komplikuje możliwość samodzielnego wykonania układu ale przy odpowiedniej liczbie chętnych możliwe byłoby wykonanie serii płytek, na których mógłbym wlutować i zaprogramować procesory.
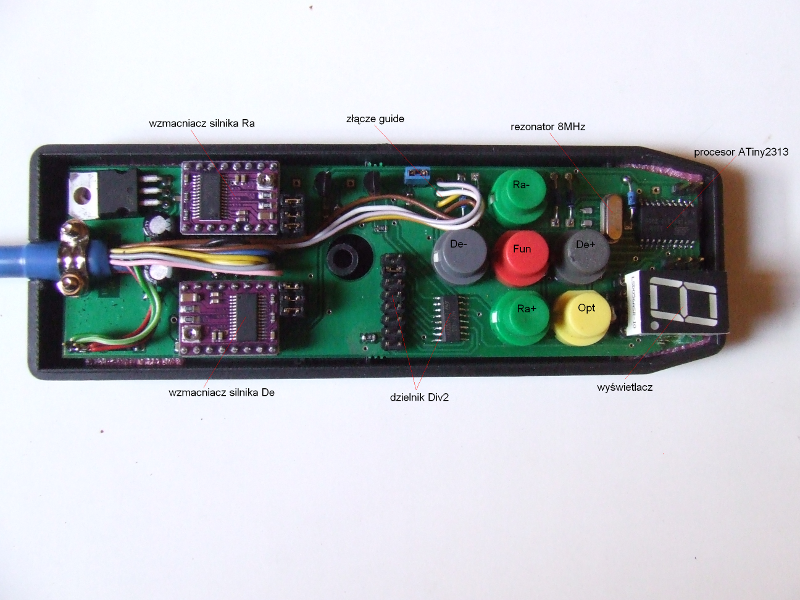
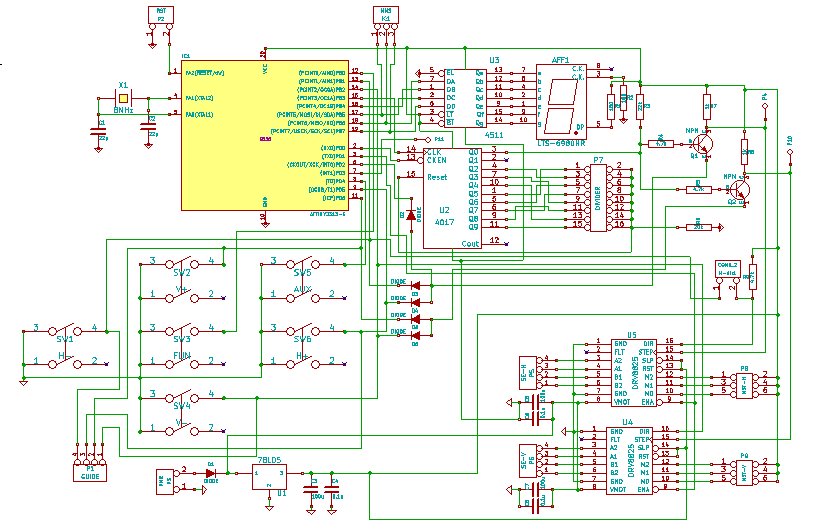
W pełni zmontowanym układzie widać wszystkie podstawowe elementy: procesor, klawisze kierunkowe, miejsce dołączenia sygnałów guide, wyświetlacz oraz oba wzmacniacze/sterowniki silników dla kanałów Ra i Dec. Wszystkie te elementy znaleźć można na schemacie układu: http://lx-net.pl/astrop/ap2_05.jpg.
Dla przypomnienia załączam adres do aktywnego arkusza konfiguracyjnego dla AstroPilota:
http://lx-net.pl/astrop/astrop.php
W tym arkuszu pokazałem jak programować AstroPilota ale również, w aktywnych linkach na stronie, opisałem podstawowe pojęcia dotyczące silników krokowych i ich sterowania. Za pomocą arkusza wyliczyć można również niezbędne parametry sterowania konstruowanego przez siebie montażu i/lub dobrać urządzenia (silnik, sterownik) do montażu istniejącego.
Reasumując, nowy AstroPilot ma następujące cechy:
- ma możliwość dopasowania sterowania do każdego montażu przez programowanie częstotliwości sterującej
- posiada zintegrowane sterowniki silników krokowych dla silników bi i unipolarnych z regulacją prądu silnika do 2.5A co w praktyce oznacza możliwość użycia silników o oporności od pojedynczych do kilkudziesięciu omów.
- możliwość użycia guide a jeśli guide działa w systemie ST4 wtedy wystarczy proste połączenie kablowe. Guide w osi Ra działa przez przyśpieszenie lub opóźnienie ruchu w tej osi omijając problem luzu (backlash) występujący podczas zmiany kierunku ruchu silnika.
- może być użyty zarówno do montaży fabrycznych (z uszkodzonym pilotem) jak i do konstrukcji amatorskich z przekładniami mechanicznymi o dowolnej wielkości - w tym także do sterowania platformą paralaktyczną.
- konstrukcja jest zwarta i tańsza niż rozwiązanie z oddzielnym zegarem i sterownikami kanałowymi, wystarczy dołączyć zasilanie oraz silniki krokowe montażu aby uruchomić napęd.
L.J.



{kind=link}