Niemniej, możliwe jest korygowanie położenia teleskopu dla tej osi przez unoszenie lub opuszczanie jednej ze stron teleskopu stojącego na platformy paralaktycznej wzdłuż osi N-S.
Aby uzmysłowić sobie o jakich wartościach mówimy, załóżmy, że nasz teleskop ma 3 nogi rozmieszczone w trójkącie o wysokości h=50cm (trójkąt o boku ok. 58cm). Podnoszenie lub opuszczanie jednej nóżki teleskopu jest więc ruchem po okręgu o średnicy 1000mm (długość l ok. 3142mm). Dla niewielkich zmian wysokości teleskopu x, kąt zmiany jest liniowo proporcjonalny do wartości x/l czyli x/(2*pi*h). W tych warunkach zmiana wysokości o 1cm (10mm) spowoduje korektę kąta w osi De o ok. 10/3142*360*60*60=4125arcsec. Jest to na tyle duża zmiana, że może pomóc w ustalaniu położenia teleskopu w dłuższym okresie czasu. Zakładając, że błąd ustawienia platformy w osi De to 10arcsec/sek to taka regulacja może pomóc w czasie ok. (4124arcsec)/(10arcsec/sek)=412sek a więc prawie 7 minut.
Eksperymentowałem z kilkoma rozwiązaniami, które muszą uwzględniać kilka warunków. Przede wszystkim ruchowi podlega dość duża masa. Dla teleskopu o wadze 30kg należy podnosić lub opuszczać co najmniej 10kg. Ruch musi być precyzyjny a napęd powinien być niezawodny mechanicznie. Używałem do budowy napędu drugiej osi rozwiązania z dźwignią oraz napędem za pomocą śruby. Innym rozwiązaniem było użycie drobnouzwojonej śruby i silnika z przekładnią i jakkolwiek oba rozwiązania spełniały swoje zadanie to ograniczeniem dla nich jest skończony zakres pracy śruby. Możliwe jest zablokowanie śruby w jednym z końcowych położeń a sprawdzanie za pomocą wyłączników krańcowych komplikuje sterowanie.
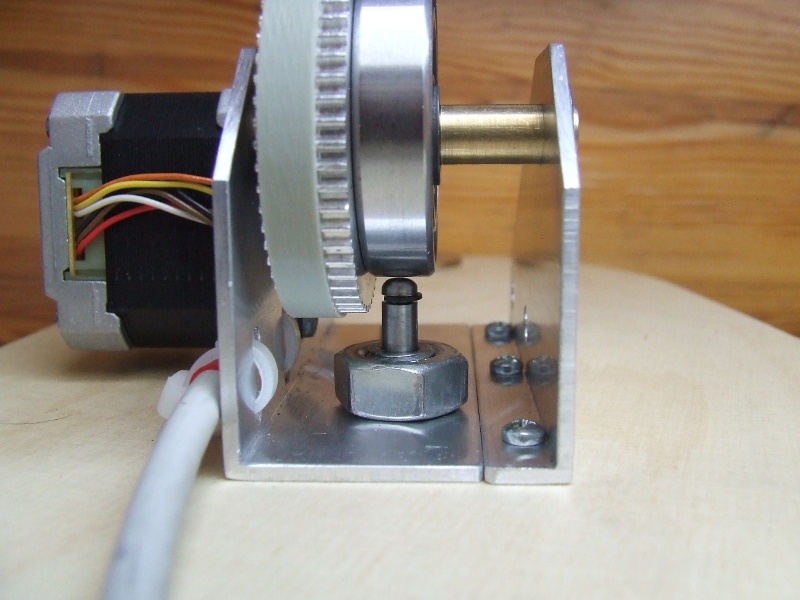
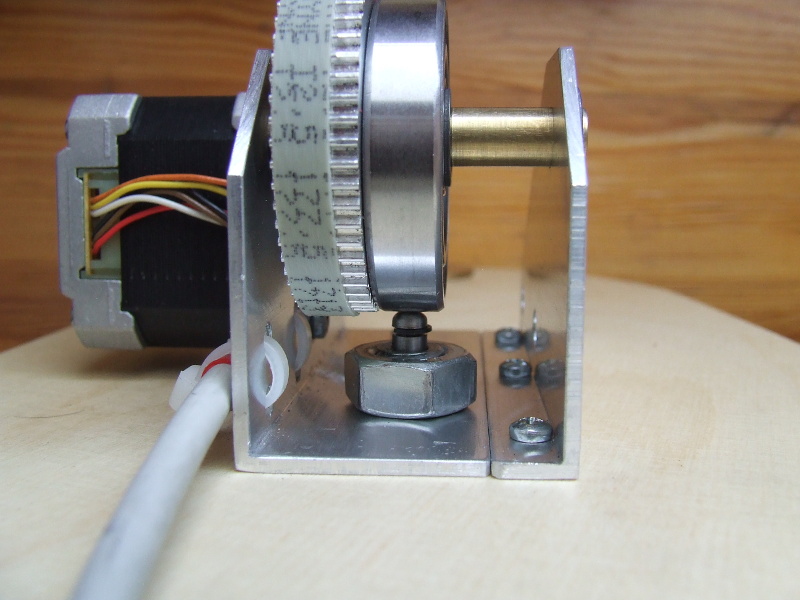
Ostatecznie wybrałem rozwiązanie w postaci mimośrodu, który ma dużą obciążalność, nie grozi mu zawieszenie i zapewnia dobrą dokładność. Rysunek pokazuje ideę takiego napędu:
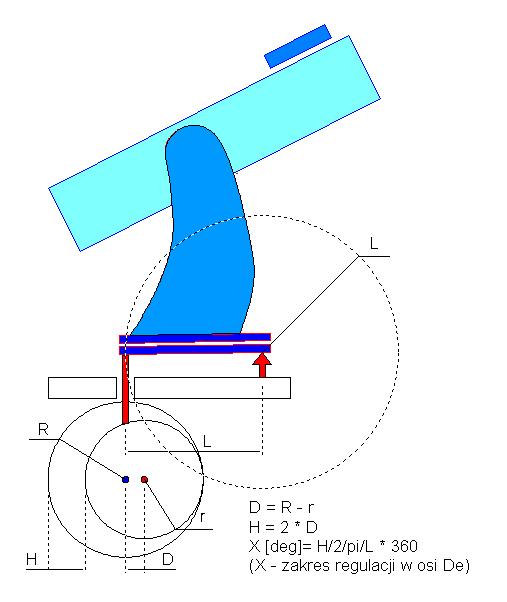
Teleskop na platformie opiera się jedną z nóg o trzpień, który poruszany mimośrodem powoduje, że teleskop jest poruszany w deklinacji.
Pokazuje to animacja:
Animacja pokazuje też, że mechanizm nie ma końca i początku - nie grozi mu więc zablokowanie - a regulację można podzielić na dwie fazy: podnoszenie lub opuszczanie. Do regulacji należy wybrać fazę podnoszenia albo fazę opuszczania a najlepszym momentem rozpoczęcia regulacji jest połowa każdej z faz kiedy możliwe jest zarówno podnoszenie jak i opuszczanie teleskopu.
Dla dociekliwych opisałem poniżej teoretyczne podstawy tego sposobu regulacji na płaszczyźnie współrzędnych XY:
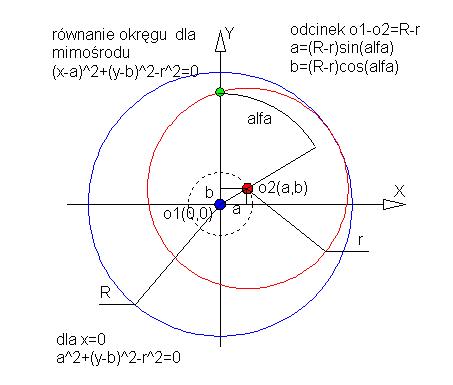
Mimośród o środku o2(a,b) porusza się po okręgu o środku o1(0,0). Równanie na płaszczyźnie XY dla okręgu mimośrodu ma oczywiście postać:
(x-a)^2+(y-b)^2-r^2=0 (1)
gdzie a i b to położenie okręgu mimośrodu względem środka współrzędnych XY a r to jego promień.
Jednocześnie mimośród zatacza okrąg o promieniu R.
Oczywiście, a=(R-r)cos(alfa) a b=(R-r)sin(alfa) gdzie alfa to kąt obrotu mimośrodu względem umownego położenia kiedy styk obu okręgów znajduje się u góry.
Ponieważ interesuje nas położenie punktu przecięcia mimośrodu z osią Y to należy rozwiązać równanie (1) przy założeniu, że x równa się zeru. Przy tym założeniu równanie 1 redukuje się do postaci:
a^2+(y-b)^2-r^2=0 -> dla x=0 (2)
Równanie 2, po podstawieniu wartości a=(R-r)cos(alfa) i b=(R-r)sin(alfa) staje się równaniem kwadratowym ze względu na y i rozwiązuje się je klasycznie licząc deltę i dwie wartości y1 i y2 z tym, że interesuje nas rozwiązanie dla dodatniej wartości y - zielony punkt. Zainteresowanym mogę podać bardziej szczegółowe wyliczenia, tu ograniczę się jedynie do zaprezentowania wyników w formie wykresów sterowania.
Pierwszy z rysunków pokazuje jak wygląda sterowanie dla pełnego obrotu mimośrodu (360 stopni). Pokazano tu ruch względny odniesiony do maksymalnego zakresu regulacji więc zmiana na wykresie odbywa się w zakresie 0-1. Konkretną zmianę wysokości teleskopu można znaleźć dla konkretnego kąta odczytując wartość względną z wykresu i mnożąc ją przez maksymalny zakres regulacji wysokości teleskopu (R-r).
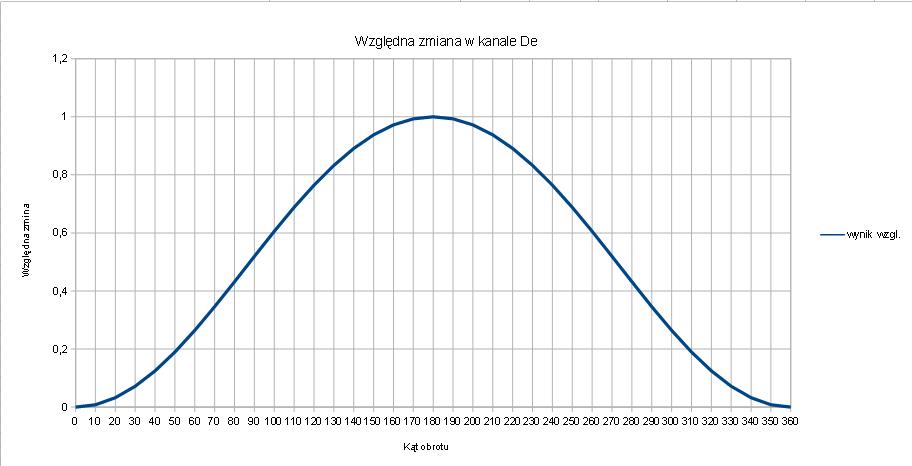
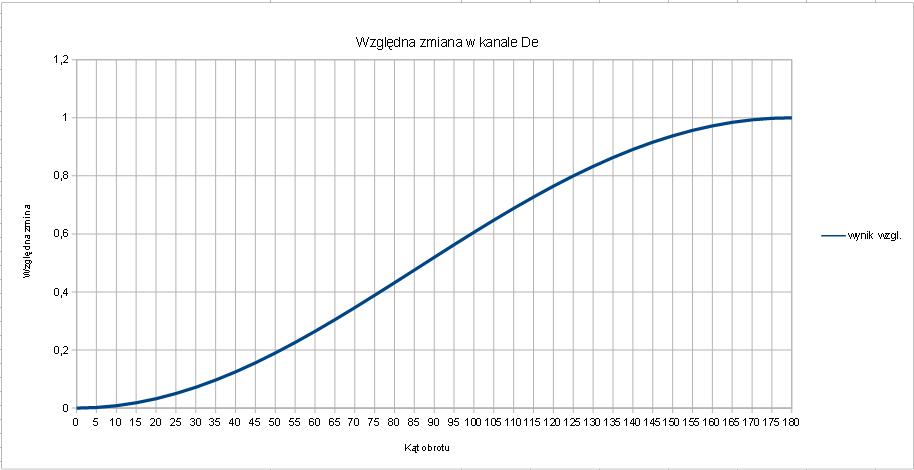
Są tu więc dwie fazy ruchu: podnoszenie i opuszczanie ale do sterowania należy użyć tylko jednej z nich jak to pokazuje kolejny rysunek dla obrotu mimośrodu o 180 stopni.
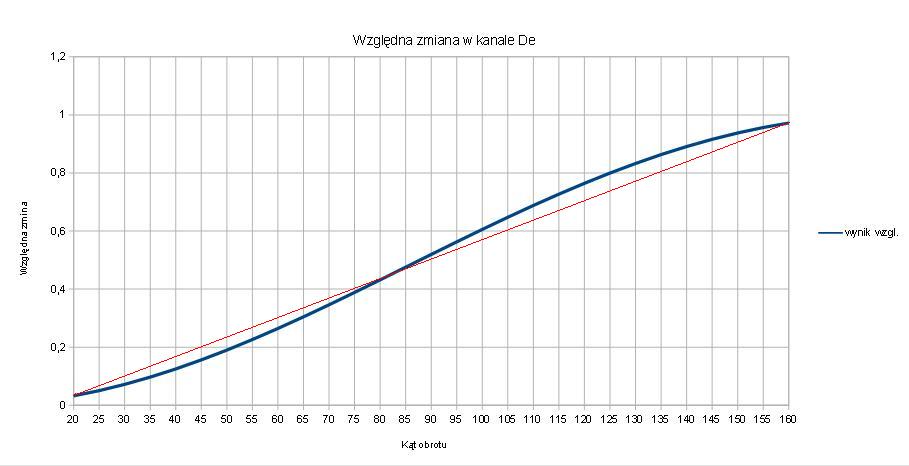
Zależność sterowania nie jest liniowa ale pomijając kąty bliskie 0 i 180 stopni można przyjąć, że regulacja powinna być skuteczna pomimo nieliniowości. Pokazuje to kolejny rysunek w zakresie kątów od 20 do 70 stopni gdzie widać, że odstępstwa od liniowości są niewielkie i nieistotne wobec innych elementów w systemie regulacji.
Na koniec można oszacować z jaką dokładnością należy obracać mimośrodem aby ruch w osi De był precyzyjny. Granicą jest wartość 1 arcsec a więc wartość zbliżona do warunków dobrego seeing-u z jednej strony oraz rozdzielczości pozwalającej na płynność ruchu jaką wykazuje ludzkie oko (około 15 zmian na sek. wywołuje wrażenie płynności). Dysponując zakresem regulacji na przykład 4124arcsec, jak we wstępnym oszacowaniu, należy wykonać co najmniej 4124arcsec/1arc=4124 kroki. Ta wartość to sumaryczna przekładnia systemu napędowego z silnikiem krokowym podzielona pomiędzy część mechaniczną i elektryczną (krok silnika, mikrokrok sterownika). Dla przykładu, dysponując silnikiem 1.8 stopnia (przekładnia 180stopni/1.8stopnia=100) i sterownikiem mikrokrokowym 1:8 potrzebna jest dodatkowa przekładnia mechaniczna o wartości co najmniej 4125/100/8 = 5.15
L.J