Mając założenia główne zająłem się funkcjami urządzenia. Jako podstawowe funkcjonalności napędu można wymienić:
- praca (śledzenie) w czasie ok. 2 godzin
- dokładność wystarczająca do astrofotografii (jak dokładnej pokażą testy praktyczne)
- możliwość zatrzymania i wznowienia pracy bez konieczności ponownej kalibracji w dowolnym momencie przebiegu urządzenia
- automatyczny powrót do pozycji wyjściowej po osiągnięciu końca przebiegu
- możliwość pracy na półkuli północnej i południowej
- możliwość korekty prędkości pracy w zakresie +3 jednostki w górę i -3 jednostki w dół
- sygnalizacja dźwiękowa stanu napędu
- sygnalizacja optyczna stanu napędu
- oszczędność energii w każdym stanie kiedy silnik nie obraca śruby
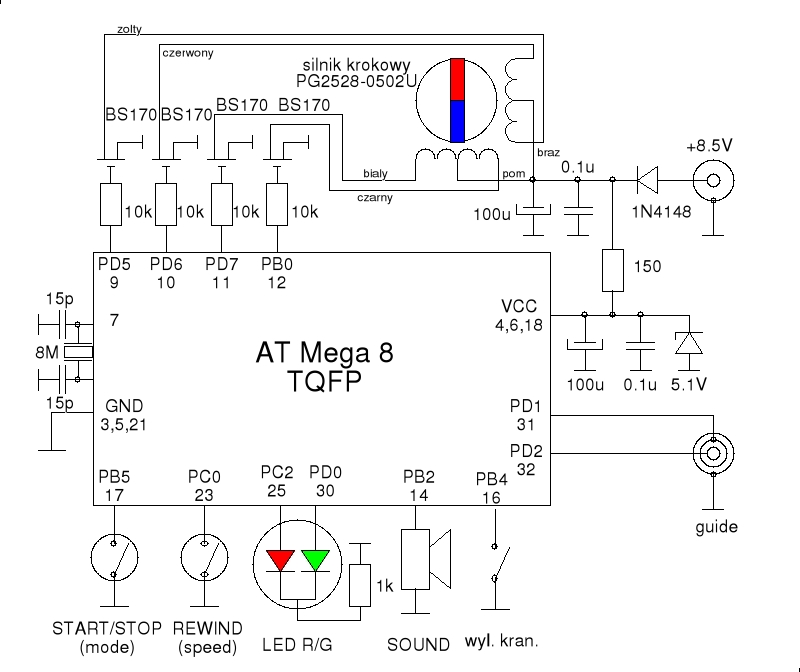
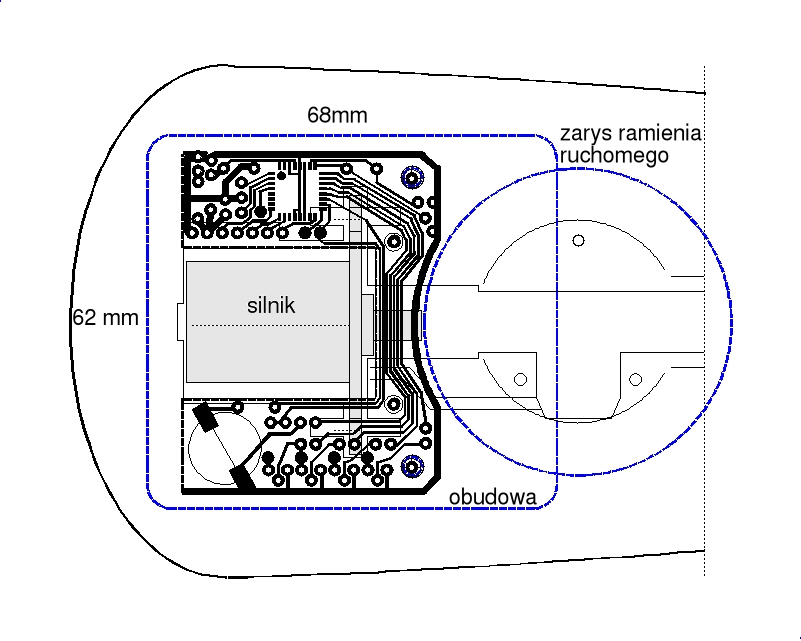
Te wymagania narzucają użycie mikrokontrolera o pamięci co najmniej 8kB (będzie to prawdopodobnie ATMega8) oraz użycie co najmniej dwóch klawiszy, dwóch diod świecących oraz sygnalizatora dźwiękowego. Ponieważ napęd będzie miał dość mało miejsca na elektronikę to wydaje się, że jest to najmniejsza ilość elementów, za pomocą których można zrealizować założone funkcje i to pod warunkiem, że zamiast dwóch diod o różnych kolorach użyję jednej podwójnej. Zrobiłem nawet projekt atrapy, na podstawie której wytłumaczę poszczególne funkcje:
Układ sterowania będzie miał dwa klawisze oznakowane jako START/STOP (mode) oraz REWIND (speed). Elementem uzupełniającym na zewnątrz będzie dwubarwna dioda LED oraz wewnątrz obudowy sygnalizator dźwiękowy.
Funkcje specjalne (mode oraz speed) dotyczyć będą odpowiednio ustawieniu na półkulę południową (domyślnie jest to półkula północna) oraz zmiany prędkości pracy o +- 3 jednostki od prędkości nominalnej. Funkcje te działać będą jedynie w czasie kilku sekund po włączeniu zasilania i będzie można zmienić ustawienia o ile użyty zostanie odpowiedni przycisk. Regulacja prędkości sygnalizowana będzie za pomocą zmiany proporcji świecenia diody świecącej (zielony/czerwony) w postaci: ZZZCCC -> ZZCCCC -> ZCCCCC -> ZZZZZC -> ZZZZCC -> ZZZCCC -> ZZCCCC ...... itd. Przewaga zielonego oznaczać będzie obniżenie prędkości a przewaga czerwonego odpowiednio jej zwiększenie. Stan ZZZCCC kiedy oba kolory świecić będą jednakowo oznaczał będzie prędkość nominalną. Prędkość zostanie zapisana na trwale w pamięci i będzie wyświetlana (własnie jako ostatnio ustawiony ciąg ZxxxxC) podczas startu urządzenia. Na podobnej zasadzie ustawiany będzie tryb pracy na półkuli północnej lub południowej. Dla ułatwienia ustawień, naciśnięcie klawisza sygnalizowane będzie krótkim sygnałem dźwiękowym.
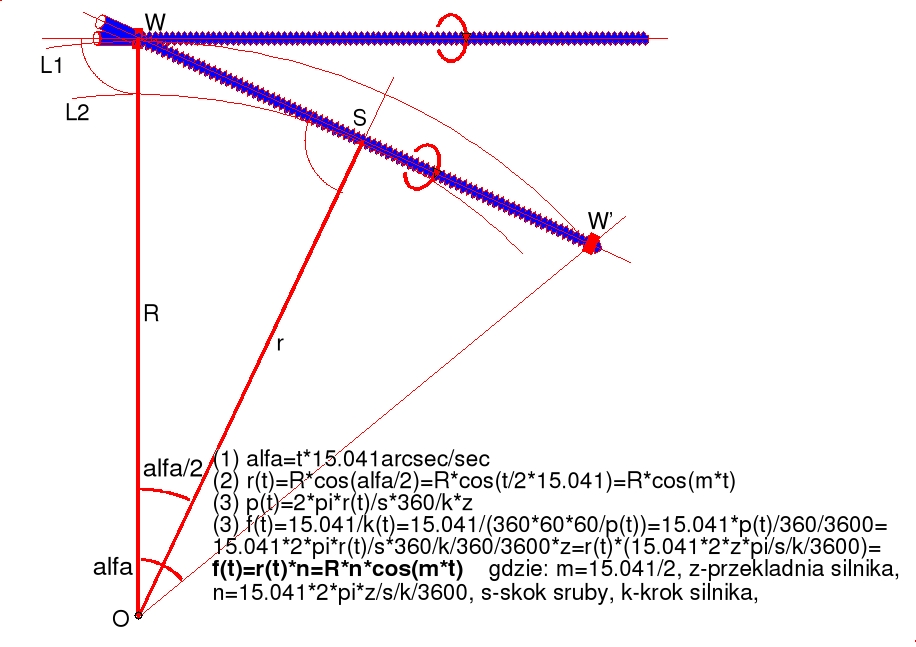
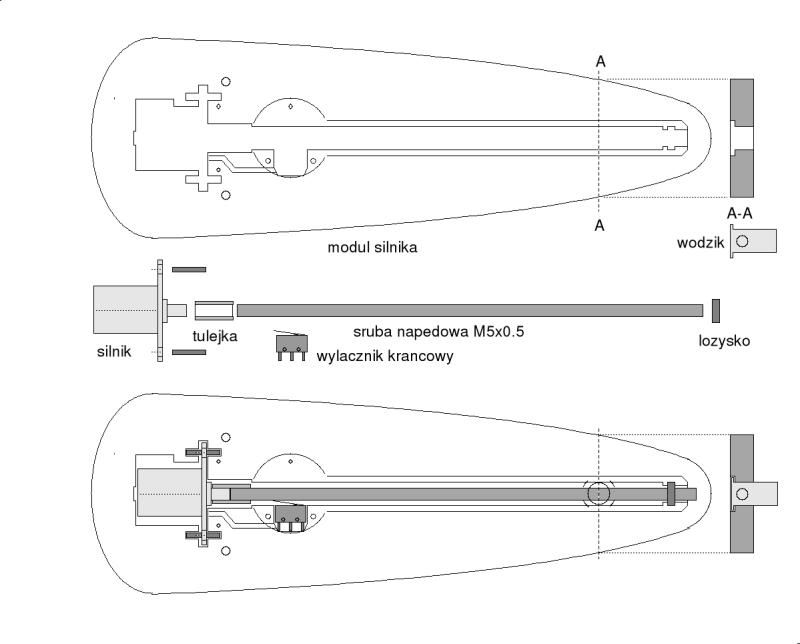
Po przejściu procedury setup-u system będzie gotowy do rozpoczęcia pracy za pomocą klawisza START/STOP. Ze względów konstrukcyjnych należy początkowo wysunąć wodzik poza stan zwarcia wyłącznika krańcowego więc początkowe uruchomienie napędu będzie trwało ok. 15 sekund i napęd ponownie zatrzyma się ale teraz już w pełnej gotowości do pracy. Od tej chwili każde użycie klawisz START/STOP spowoduje odpowiednio uruchomienie lub zatrzymanie napędu z jednoczesnym śledzeniem ścieżki przebiegu (zgodnie z krzywą teoretyczną opisaną wcześniej). Za pomocą klawisz REWIND będzie można w każdej chwili cofnąć napęd do położenia startowego (do stanu kiedy można złożyć napęd) ale ze względu na konsekwencje użycia tego klawisza jego przypadkowe naciśnięcie nie spowoduje żadnej reakcji. Dopiero jednoczesne naciśnięcie klawisza REWIND oraz START/STOP spowoduje, że napęd zostanie przewinięty z prędkością ok. 10 krotnie szybszą niż prędkość normalnej pracy. Podczas przebiegu roboczego dioda LED świecić będzie w sposób informujący mniej więcej w jakim położeniu jest napęd. Zamierzam osiągnąć to zmieniając proporcje świecenia diody w okresie ok. 1.6 sekundy w taki sposób, że na początku przebiegu przez prawie 1.6 sekundy dioda świecić będzie na zielono a przez ułamek sekundy na czerwono i w miarę upływu czasu te proporcje będą się zmieniać tak, że w środku czasu przebiegu proporcje świecenia obu barw wyniosą pół na pół a w końowym etapie dioda będzie świecić na czerwono z coraz krótszymi błyskami zielonymi. Po osiągniecie stanu końcowego (stan stwierdzony przez pomiar czasu pracy napędu) napęd zostanie automatycznie przewinięty do pozycji początkowej. Każdorazowe użycie klawisza sygnalizowane będzie sygnałem dźwiękowym, podobnie swoistym sygnałem sygnalizowane będzie osiągnięcie odpowiednich stanów napędu a we wszystkich stanach STOP system odłączy silnik od zasilania oszczędzając energię.
Mam nadzieję, że takie działanie napędu będzie odpowiednio wygodne a jednoczesnie funkcjonalne.
L.J.







{kind=link}